
Effects of increasing a parameter independently Parameter Rise time Overshoot Settling time Steady-state error Stability k p Decrease Increase Small change Decrease Degrade. Remove integral actions from the controller by setting it to either 0 if it is in units of reset.

Look Up Table For Pid Controller Tuning With The Ziegler Nichols Method Download Table
And the oscillation period are then used to set the P I and D gains depending on th.
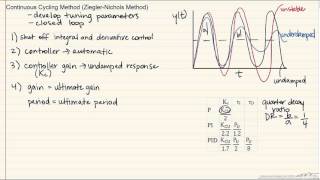
. We would like to show you a description here but the site wont allow us. Given two measured feedback loop parameters derived from measurements. Ziegler-Nichols Tuning Method Ziegler-Nichols tuning method to determine an initialestimated set of working PID parameters for an unknown system Usually included with industrial process controllers and motor controllers as part of the set-up utilities Some controllers have additional autotune routines.
The ZieglerNichols tuning method is a heuristic method of tuning a PID controller. First note whether the required proportional control gain is positive or negative. PB 44 PB u.
To do so step the input u up increased a little under manual control to see if the resulting steady state value of the process output has also moved up increased. The standard reference for PID tuning seems to be the Ziegler-Nichols tuning rules developed in 1942 on a pneumatic controller. It is performed by setting the I integral and D derivative gains to zero.
Here is how to tune a controller using these rules. The Zeigler Nichols Open-Loop Tuning Method is a means of relating the process parameters - delay time process gain and time constant - to the controller parameters - controller gain and reset time. Psr Tuning in Piscataway NJ.
PB 22 PB u. This will let you tune the derivative proportional and integral gains. Ziegler and Nathaniel B.
Integral Gain in Repeats per Minutes or Repeats per Seconds. YEARS WITH 888 495-3593. The Ziegler-Nichols PID Tuning Methods usually result in systems that have quite a bit of overshoot so you will probably want to make minor adjustments after the initial settings.
The value of K P at the point of instability is called K MAX. It was developed by John G. If so then the steady-state process gain is positive and the required Proportional control gain Kc has to be.
The Ziegler-Nichols rule is a heuristic PID tuning rule that attempts to produce good values for the three PID gain parameters. Pg83 The two previous tuning techniques require a reasonably detailed control-loop analysis. Name A - Z Ad 1 800 Car Buyers.
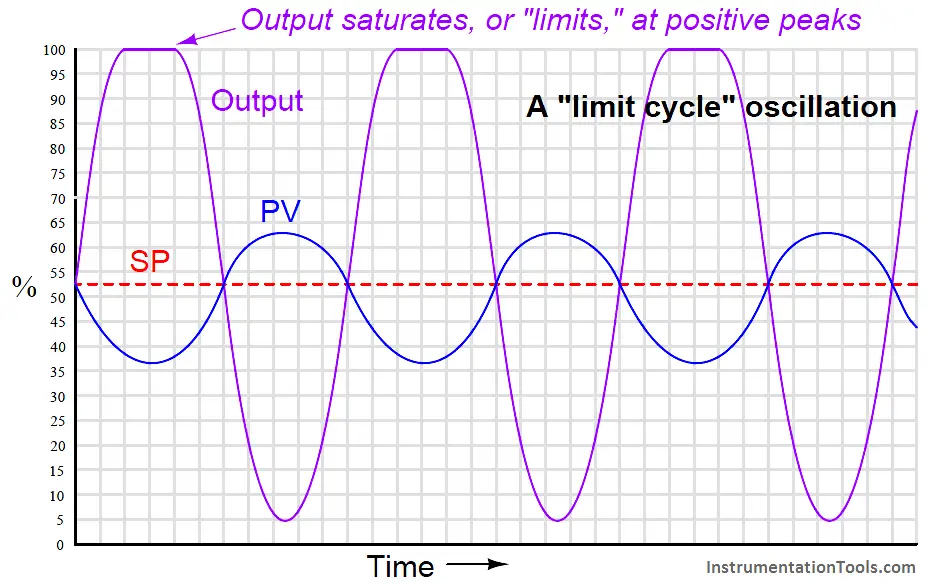
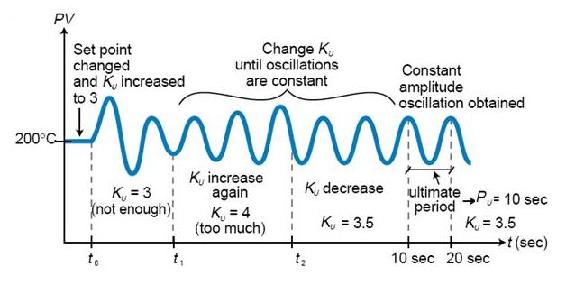
The period Tu of the oscillation frequency at the stability limit. The Ziegler-Nichols method is often completely acceptable for tuning control loops that respond quickly for example liquid flow rate control loops that respond with an ultimate peak-to- peak time period UTP of 5 to 15 s. The P proportional gain is then increased from zero until it reaches the ultimate gain at which the output of the control loop has stable and consistent oscillations.
Ti 083 t u. The objective of this article is to study the speed control of a DC motor using PID controller and understand the Ziegler-Nichols ZN tuning method for a PID controller. For level control integrating processes use.
For robust control use. Integral Time in Minutes per Repeat or Seconds per Repeat. This method starts by zeroing the integral and differential gains and then raising the proportional gain until the system is unstable.
A popular method for tuning P PI and PID controllers is the ZieglerNichols method. PID controllers are widely used in many industries such as paper mill cotton textile industries. The frequency of oscillation is f 0.
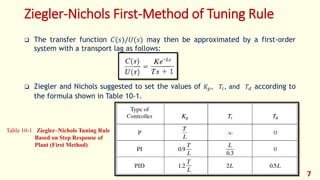
If in units of integral set it to be very large. Ki 12 t u. ZieglerNicholsFirst Tuning Method ZieglerNichols ZN rules are widely used to tune PID con-trollers for which the plant dynamics are precisely not known it can also be applied to plants of known dynamics.
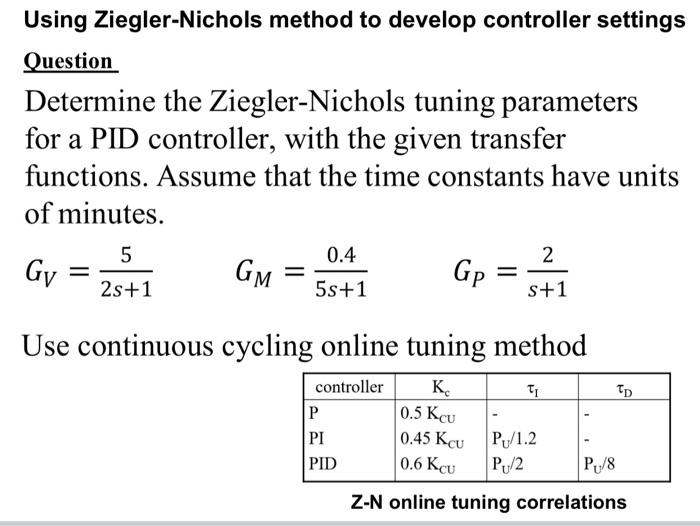
Ziegler and Nichols proposed rules for determining values of proportional gain K p integral time T i and derivative time T d based on the. See reviews photos directions phone numbers and more for Tuning Shops locations in Piscataway NJ. In this short tutorial I will take you through the two Ziegler-Nichols tuning methods.
DC Motor Speed Control PID tuning Ziegler-Nichols Method Matlab-Simulink. Auto Repair Service Automobile Salvage Automobile Truck Brokers 7 Website More Info. PID controller also finds its applications in drones.
It has been developed for use on delay-followed-by. Ti 16 t u.
Continuous Cycling Method Ziegler Nichols Method Youtube

Can Ziegler Nichols Equations Be Used To Tune Non Interactive Controllers

Ziegler Nichols Pid Controller Tuning Method Youtube
9 3 Pid Tuning Via Classical Methods Engineering Libretexts

Pid Controller And Ziegler Nichols Method How To Get Oscillation Period Electrical Engineering Stack Exchange
Solved Using Ziegler Nichols Method To Develop Controller Chegg Com

Ch2b Slide65 Ziegler Nichols Open Loop Pid Tuning Cont D Youtube

Ziegler Nichols Tuning Formula Download Table

Ziegler Nichols Method An Overview Sciencedirect Topics
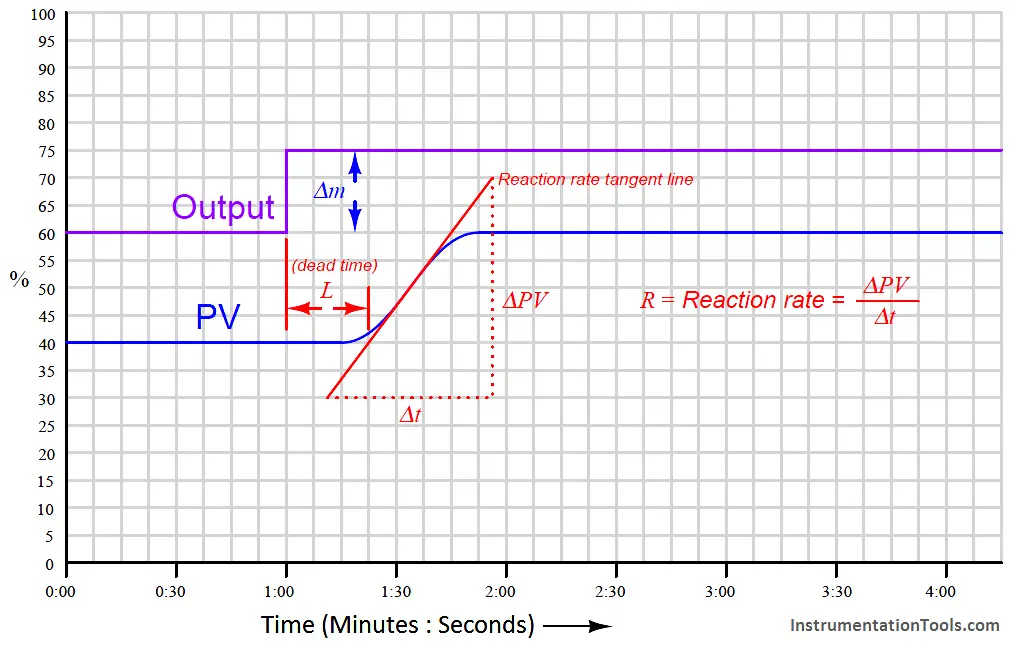
Ziegler Nichols Open Loop Method Inst Tools

Continuous Cycling Method Ziegler Nichols Method Youtube
Ziegler Nichols Closed Loop Method Ultimate Gain Inst Tools

Ziegler Nichols Pid Controller Tuning Method Modifying Kp Ki And Kd Download Scientific Diagram

Engineers Excel Com Ziegler Nichols Closed Loop Tuning Calculator

Pid Tuning Methods Incatools

Ziegler Nichols Tuning Formula Download Table
Modern Control Lec 06 Pid Tuning

Tuning Based Ziegler Nichols Second Method 7 Download Table

Control System Ziegler Nichols Method Use Time Value Of 63 Of Process Variable Or Steady State Level Line Electrical Engineering Stack Exchange




